Less than 3 months after the "Samsara" release in July, the dRonin team has just released "Quixote" bringing many new features and enhancements. Here, we will go over the most relevant changes for RE1 owners and give information on how to update your RE1 to the new release.
1. More Serial Ports
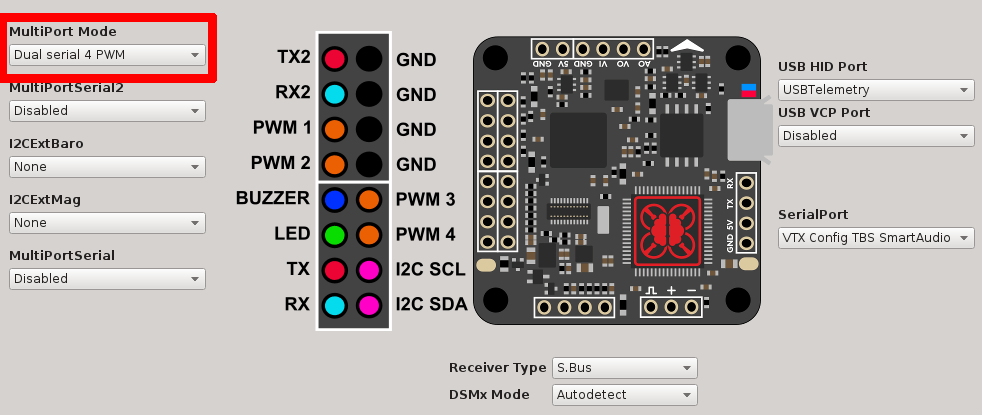
The MultiPort now has two modes: "Normal" and "Dual Serial 4 PWM". As the name suggests, the later option exposes an additional serial port on MultiPort, so a total of 3 serial ports (not including the serial receiver port) are available for attaching devices like, GPS, serial loggers, etc. Using this mode will reduce the number of PWM outputs (used for ESCs and servos) to 4 and the first two outputs of the MultiPort become the "Tx" and "Rx" pins of the serial port. Note that this means that the outputs will be shifted, i.e., the first PWM output will be the pin labeled "3" on RE1, the second "4", and so on. The hardware tab of the dRonin GCS now shows the pin assignment to make things clearer. Finally, when using this mode you will need to set the PWM update rate for PWM outputs 3 and 4 separately (you find this setting in the Outputs tab of the GCS), as the outputs use different timers of the STM32 microcontroller on RE1. This is a good thing, as you can e.g. configure outputs 1 to 3 for OneShot125 and output 5 for 50Hz PWM, to drive the tail servo of a tricopter.
2. External Compass and Barometer Support
While the "R" in RE1 stands for racing, it can actually be used for much more than that. When additional sensors, i.e., a barometer, a compass, and GPS, are attached to it, it has full navigation capabilities and can perform position-hold, return-to-home, waypoints flights etc. The graphical OSD will even show you a map with your position relative to the starting point, the waypoints, an arrow indicating the home position, and more.
With the Quixote release it is now possible to attach barometers and magnetometers to the I2C pins of the MultiPort of RE1. The supported compass model "HMC5883" is commonly found on GPS modules designed to be used with other flight controllers. To use them with RE1, the GPS serial "Tx" and "Rx" signals are connected to one of the serial ports of RE1 and the compass I2C "SCL" and "SDA" signals are connected to the I2C pins. The barometer models supported are "BMP280" and "MS5611". Modules with those types of barometers can easily be found on eBay etc. BrainFPV will also release a barometer add-on for RE1 that uses the extension connector, so no wiring will be necessary. If you are just interested in knowing your altitude (by displaying it in the OSD, of course) or using altitude-hold, you don't need a GPS or magnetometer and can simply attach a barometer to the I2C port.
Finally, note that the navigation capabilities of dRonin are still somewhat experimental. This means you so should not expect a super easy setup and flawless out-of-the-box performance and it should only be used by experienced users who are willing to experiment and adjust settings (or even contribute code to dRonin :)). Some information on how to get started with navigation can be found on the dRonin wiki.
3. ExpoM
How sensitive your multirotor is to stick inputs on your transmitter depends on the rates you configure. With the Quixote release, the default roll and pitch rates are 250 deg/s (degrees per second), which means at full stick deflection your multirotor will perform just a bit shy of three quarters of a rotation per second. Of course, this is a bit slow for freestyle flying where you want to do crazy fast flips and rolls, so you may want to bump your rates to for example 720 deg/s, i.e. , two rotations per second. However, this leads to the problem that your sticks become very sensitive making it difficult to perform slow controlled maneuvers that require precise stick inputs. The solution for this is to use "expo", meaning an exponential curve is used to make the sticks less sensitive when they are close to center while still giving the full rate at maximum stick deflection.
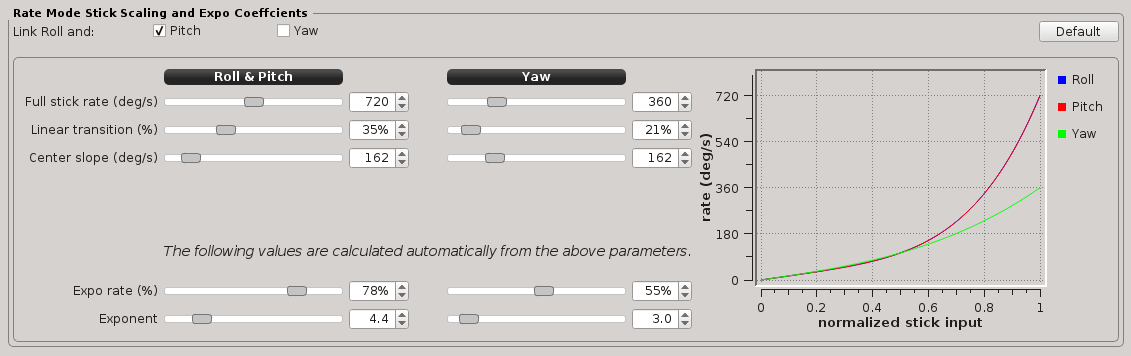
Of course, this has been around for ages and is supported in pretty much every transmitter and flight controller. However, existing implementations typically use a fixed exponent of 3, giving you very little control over the shape of the curve. With the introduction of "ExpoM" in the Quixote dRonin release, different exponents can be used. The GCS allows you to configure a center stick rate, a rate at full stick deflection, and the stick deflection at which the transition occurs, which is then used to calculate the expo strength and the exponent. The image below shows an example with 162 deg/s at center stick, 720 deg/s at full stick and the calculated expo strength of 78% and an exponent of 4.4. This feature can be found under "Stabilization" in the GCS. We encourage you to experiment with different expo curves until you find one that suits your flying style.
4. Other Notable Changes
- Control deadbands were introduced, which allow lowering the PID gains for small errors. This can reduce wear of servos on airplanes and reduce prop wash induced oscillations on multirotors.
- Significantly reduced control latency. This is especially noticeable with RC systems that use high update rates.
- A bug was fixed that could result in erroneous LED colors on BrainFPV RE1.
A full list of changes can be found here.
Upgrading to Quixote
Thanks to the dRonin upgrade assistant, upgrading to Quixote couldn't be easier. Simply download the latest release, connect your RE1 to USB and the assistant will guide you through the upgrade process. As a part of the upgrade, dRonin uses a cloud based service to translate your settings to the new release. Note that if you had been using "MultiPort" on RE1, e.g., for FrSky SmartPort telemetry, you will need to configure it again manually, as the setting has been renamed from "MultiPort" to "MultiPortSerial". All other settings should survive the upgrade without the need of manually changing things.
The release can be found on the dRonin website and the video by @jhitesma below explains how to perform the upgrade. If you run into problems, make sure to consult the Errata & Troubleshooting section on the release page.
Happy dRonin 😉
Re: dRonin Quixote. Martin, on PWM output 3 and 4. Where are they getting their ground? If installing a GPS, which ones would be suitable. Thanks!