Article sections
Introduction
This manual is for the BrainFPV RADIX 2 Flight Controller released in 2020. It is the successor of the legendary RADIX flight controller and everything has been vastly improved. From a blazing fast H7 processor running at 480 MHz, an improved graphical OSD, a built-in voltage regulator that can handle up to 8S (35 V), to 8 motor outputs, driverless flashing, and more.
An improved Revision 2.0 of the RADIX 2 was released in 2024. The new revision has an improved 5 V voltage regulator (the same that is used on the RADIX 2 HD) and a more accurate barometer (Infineon DPS310).
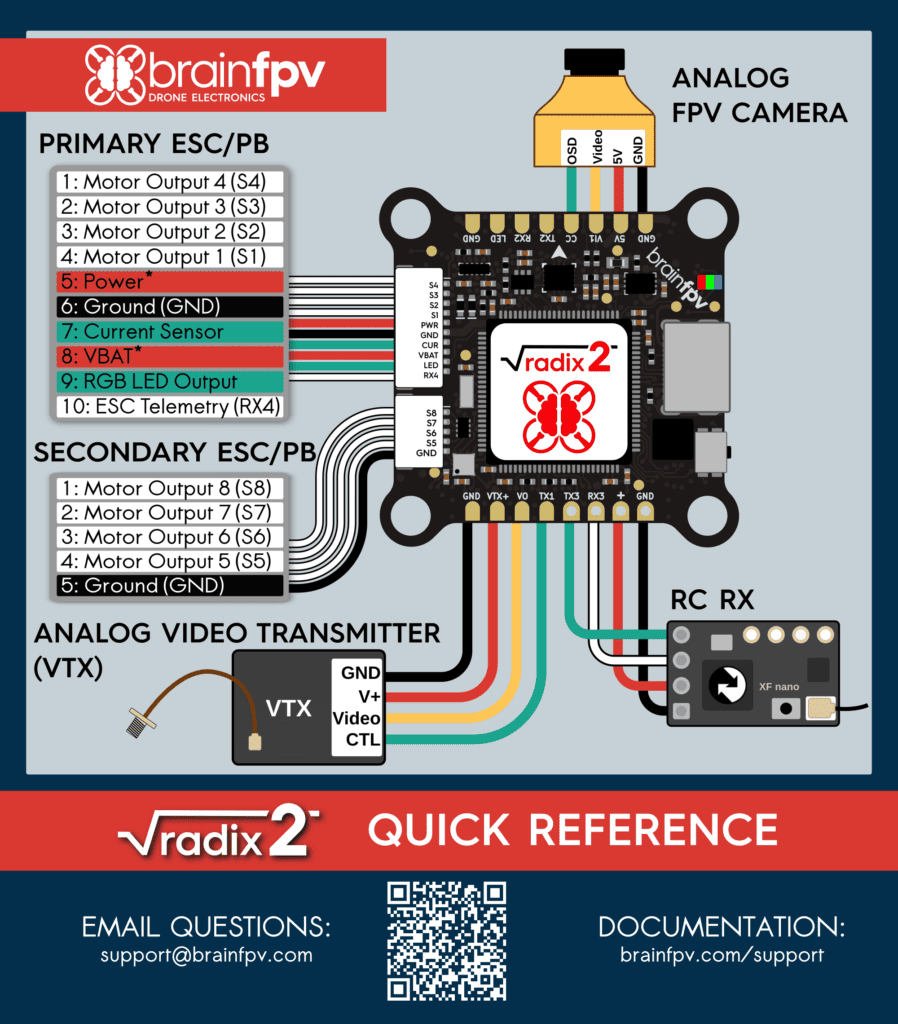
The Quickstart Reference at the beginning of the manual shows how to connect an RC receiver, an analog FPV camera, and video transmitter to the RADIX 2. Refer to later sections for how to connect additional devices, such as a second camera or a GPS unit.
NOTE: If something is missing or unclear, don’t hesitate to contact us at support@brainfpv.com. We are happy to help!
Quick Reference
Installing Firmware
The RADIX 2 uses the BrainFPV bootloader for easy updating of the installed firmware. When the flight controller is in bootloader mode, it will appear as an external drive when connected to a computer and the firmware is updated by simply copying the firmware file to the drive. This has the advantage that no special drivers are needed for updating the firmware. See here for more details. Download firmware from here.
Connect RC Receiver
The RADIX 2 flight controller can be used with a large number of different RC receivers. Pretty much any “single wire” receiver, i.e., serial or PPM (Pulse Position Modulation) is supported. Older PWM receivers that use a separate wire per channel are not supported. Below you find instructions on how to connect the most commonly used receivers.
TBS Crossfire Nano Rx and TBS Crossfire Diversity Nano Rx Receiver
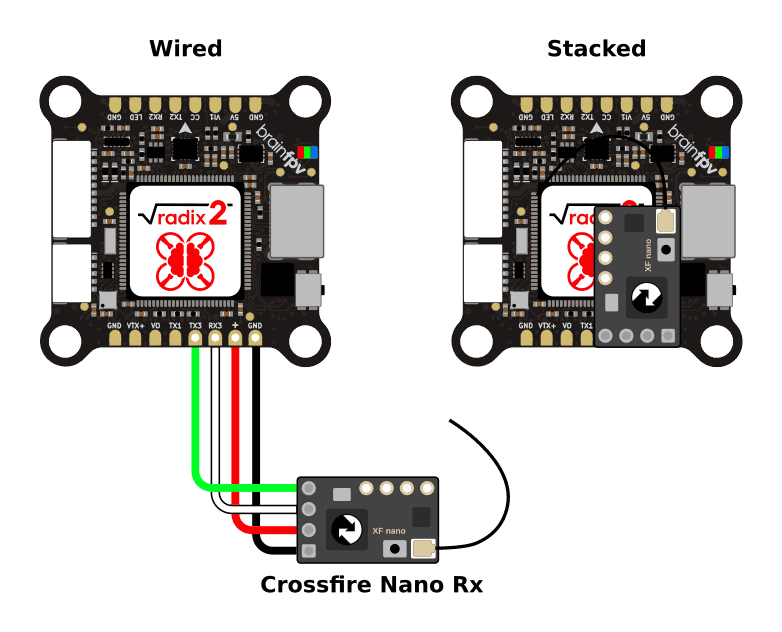
The Team BlackSheep (TBS) Crossfire system is a popular long-range system that operates on the 915MHz / 868MHz frequency band. When using a Crossfire receiver with the RADIX 2, connect it as shown in the diagram below.
- Ground (GND): Connect to GND pad of RADIX 2.
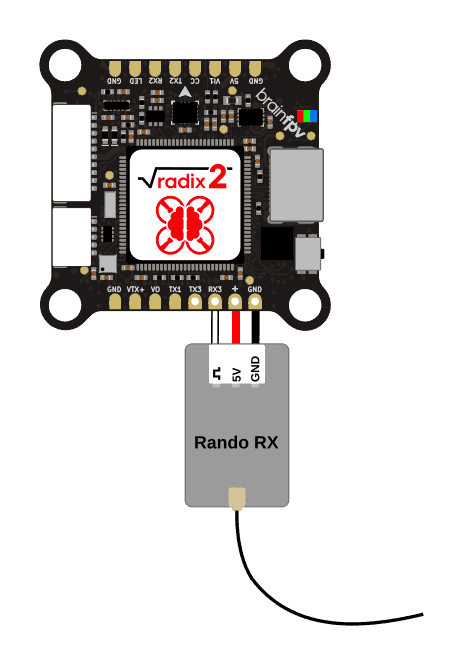
- Power: Connect to + pad next to RX3 of the RADIX 2. This is a special 5 V pad that is also powered when your RADIX 2 is connected to USB. So you can configure your transmitter without connecting the battery to your drone.
- CH 1: Connect this wire to RX3 (UART3 RX). Make sure to set this output to CRSF TX when configuring the Crossfire system.
- CH 2: Connect this wire to TX3 (UART3 TX). Make sure to set this output to CRSF RX when configuring the Crossfire system.
You can either wire the Nano Rx to the RADIX 2, or use the pins included with the Nano Rx to stack it on top and secure it using double sided tape. The Crossfire Diversity Nano Rx is connected the same way.
Note: If you are using the backup battery functionality of the Diversity Nano Rx, it will draw more current than a normal receiver when it is charging the battery. This may cause problems when the RADIX 2 is powered from USB, as your computer may disconnect the device if it draws too much current. In this case, you can power the receiver from a regular 5 V pad of the RADIX 2.
TBS Tracer Nano Rx
The Team BlackSheep (TBS) Tracer system is a medium to long-range RC system operating on the 2.4 GHz band. The way it connects to the RADIX 2 and configuration of the is identical to the Crossfire Nano Rx shown above.
ExpressLRS
ExpressLRS is a popular open source long range RC system. There are a wide variety of receivers from multiple manufacturers available. The ExpressLRS receivers use the CRSF protocol like the TBS Crossfire system. The wiring and configuration is identical to the Crossfire receiver shown above.
Immersion RC Ghost Receiver
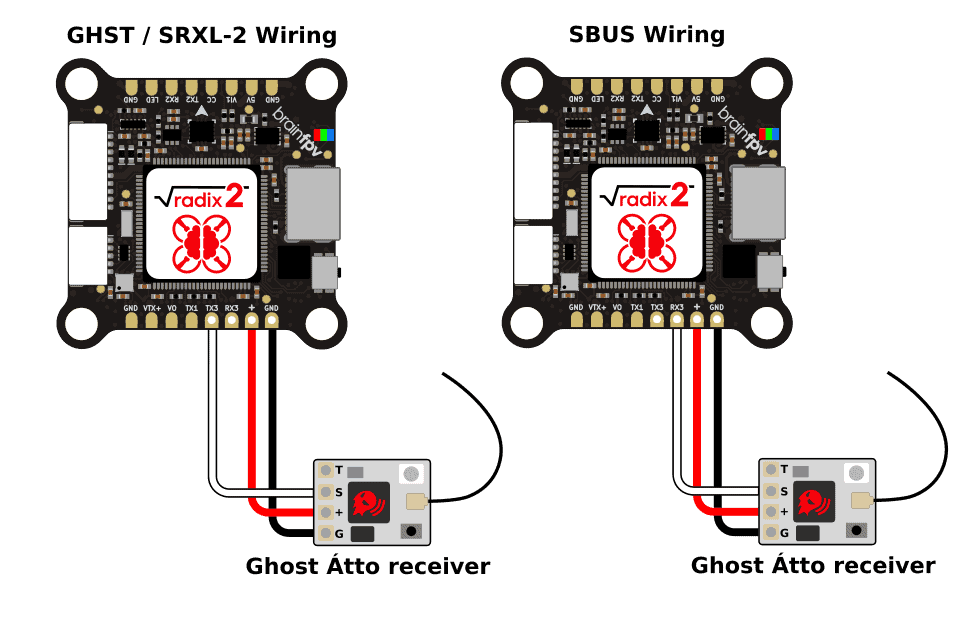
The Immersion RC Ghost system is a medium to long-range RC system operating on the 2.4 GHz band. The receivers can use different protocols. The preferred protocol is GHST which is supported by both Betaflight and INAV. Wire the receiver as shown below. Note that the signal wire connects to the TX3 pad of the RADIX 2, not to the RX3 pad. Alternatively, the Ghost receivers can also use the SRXL-2 or SBUS protocol.
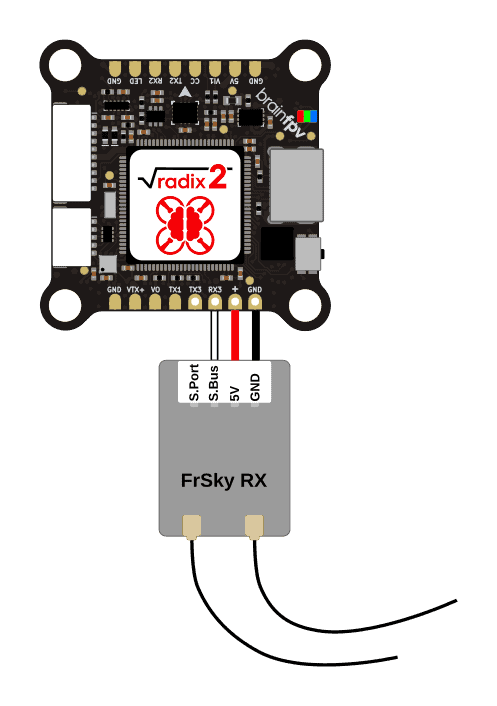
 FrSky S.Bus / S.Port Receiver
FrSky S.Bus / S.Port Receiver
The diagram below shows how to connect a FrSky S.Bus receiver to the RADIX 2. The S.Bus wire carries the RC data and needs to be connected to RX3. Some FrSky receivers also have an S.Port wire / pad for telemetry information that allows it to send battery voltage, current draw, etc. back to your RC receiver. If your receiver features S.Port, connect it to TX6 on the bottom of the RADIX 2. Note that you can also use a different TX pad of an unused UART (not RX3, as UART3 is used for S.Bus).
FrSky FPort Receiver
FrSky FPort is a receiver protocol that uses a single wire for both RC data sent to the flight controller and telemetry data sent back to your RC transmitter. The FPort signal needs to be connected to the TX3 pad of the the RADIX 2, as shown below.
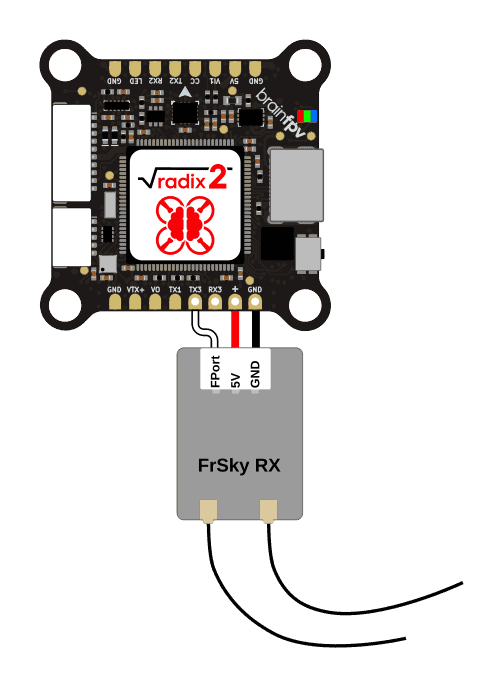
Make sure to set the receiver protocol to FPort and enter the following in the Betaflight command line (CLI) to make it work:
set serialrx_halfduplex = ON
set serialrx_inverted = ON
save
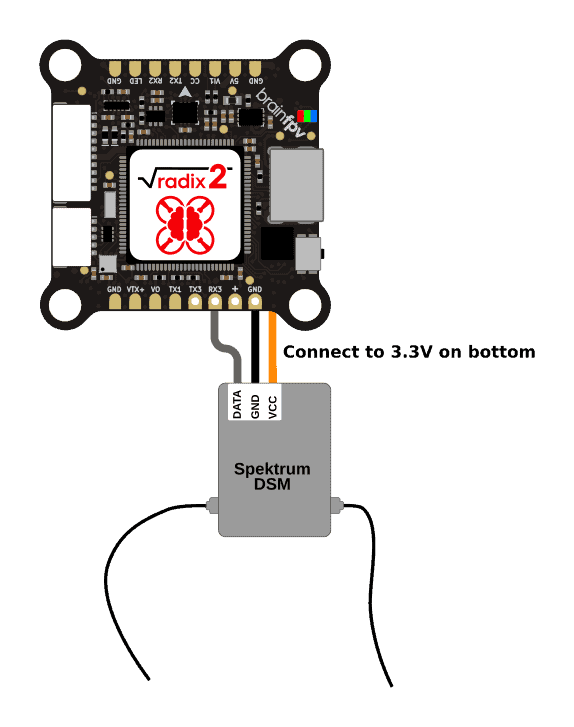
Spektrum DSM Receiver
If you use a Spektrum DSM or DSMX satellite receiver, connect it as shown below. Unlike pretty much every other receiver on the planet, the satellite receivers need to be powered using 3.3 V instead of 5 V, so make sure to connect the orange wire to the 3.3 V pad on the bottom of the RADIX 2.
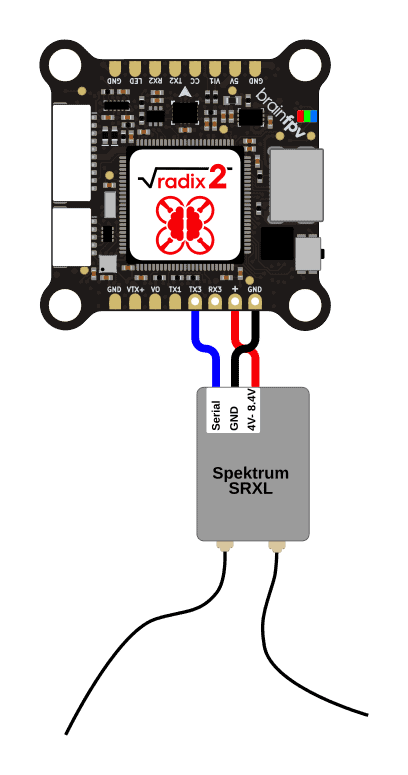
Spektrum SRXL / SRXL-2 Receiver
Some newer Spektrum receivers support the SRXL or SRXL-2 protocol and they can be powered from 5 V (amazing!). This RC protocol uses a single wire for both RC data and telemetry. The serial wire needs to be connected to the TX3 pad, as shown below.
Other Receivers
Apart from the receiver types listed above, the RADIX 2 can be used with other serial and PPM (Pulse Position Modulation) receivers, as long as they are supported by the firmware used (Betaflight). Pretty much all receivers can be powered from 5 V. If in doubt, consult the manual of your receiver. The signal wire needs to be connected to the RX3 of RADIX 2, which can function as UART3 RX for serial receivers, or PPM input for PPM receivers.
Connect Analog FPV Cameras
The RADIX 2 supports up to 2 FPV cameras being connected to it. Having a second camera enables you to switch cameras using a switch on your RC transmitter.
Most FPV cameras work reliably when powered with 5 V, so the best way is to directly connect it to the 5 V output on the RADIX 2. If your camera needs a higher voltage, you can either power it directly from the battery (if the camera supports it), or use a separate voltage regulator. If you use the RADIX 2 Power Board, you can also switch the Power Board to output 10 V and power the camera from there.
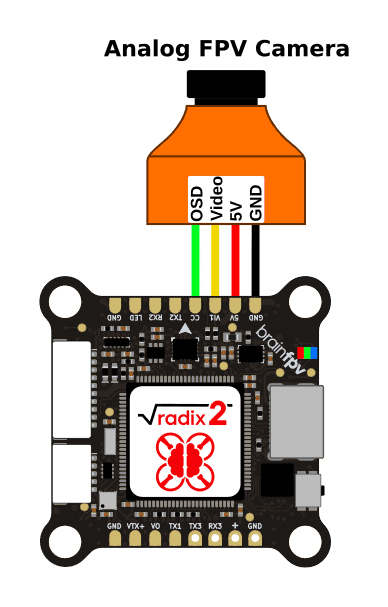
The primary FPV camera is connected the the Video Input 1 (VI1), 5V, and ground (GND) pads on the top of the RADIX 2, as shown below. Many cameras have an “OSD” input that is intended for connecting a “joystick PCB” that comes with the camera and can be used to change camera settings. If your camera supports this feature, the OSD pin can be connected to the Camera Control (CC) of the RADIX 2. This allows you to change camera settings using the sticks of your RC transmitter. Note that this does not work reliably with all cameras, see here for more information.
Some newer camera feature a serial port (UART) with RX and TX pins that can be used to configure the camera instead of the Camera Control (CC) pin. If you have such a camera, you can connect the TX and RX pins to the RX2 and TX2 pads next to the CC pad. Make sure to connect the TX pin of the camera to the RX pad of the flight controller and vice versa.
Secondary FPV Camera
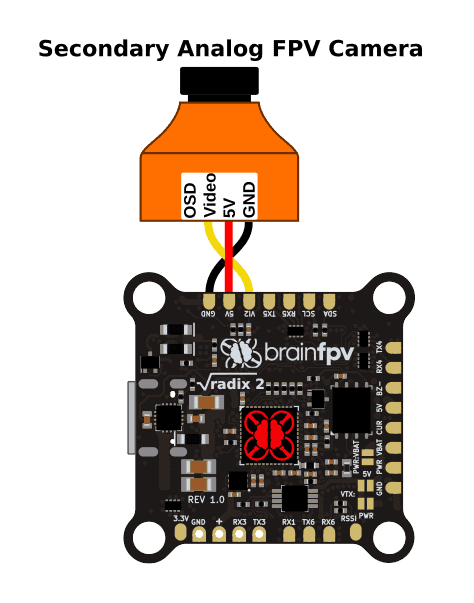
If you want to connect a secondary analog FPV camera to your RADIX 2, use the Video Input 2 (VI2), 5V, and ground (GND) pads on the bottom. Note that the camera control functionality can only be used for one camera.
If you are using Betaflight on your RADIX 2, the camera can be switched using the USER2 switch:

Connect Analog FPV Video Transmitter
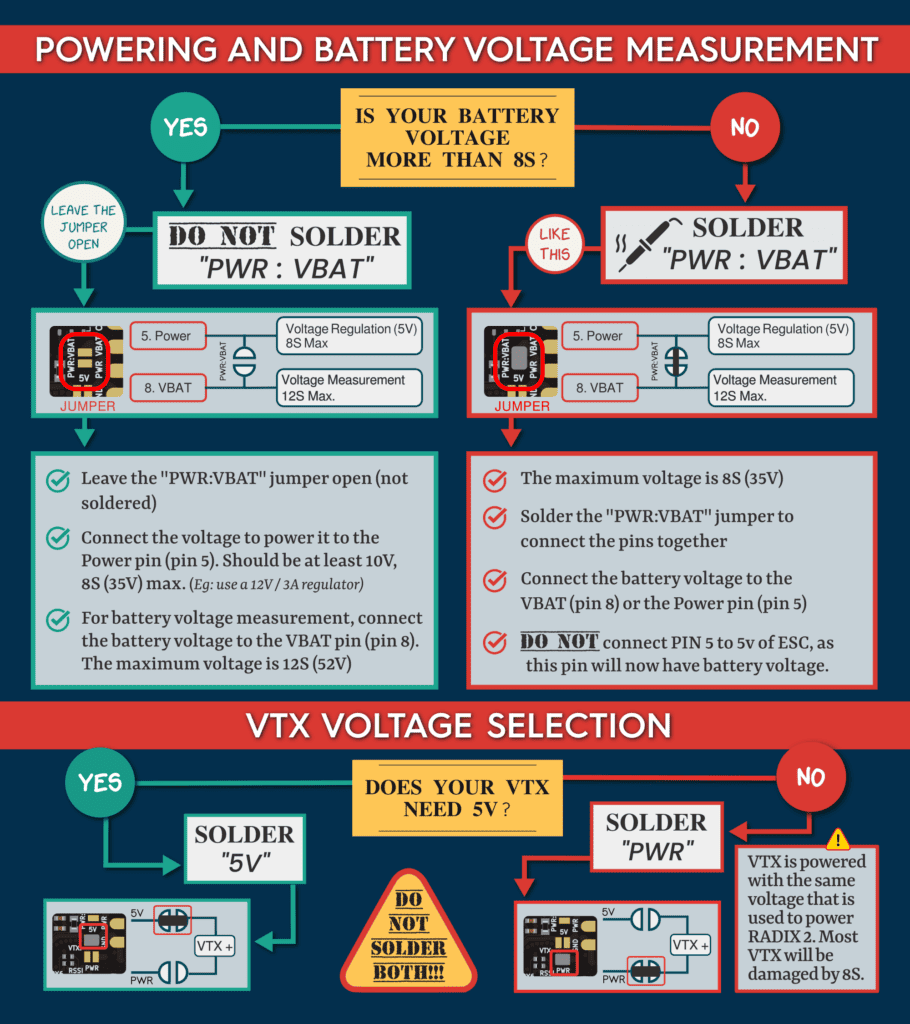
To transmit video from your drone to the ground, you need an analog video transmitter. The RADIX 2 supports video transmitters that are powered with 5 V, or with a higher voltage. i.e., either the battery voltage, or the voltage that is connected to the Power pin (pin 5) of the primary 4-in-1 ESC connector (with the “PWR:VBAT” jumper left open).
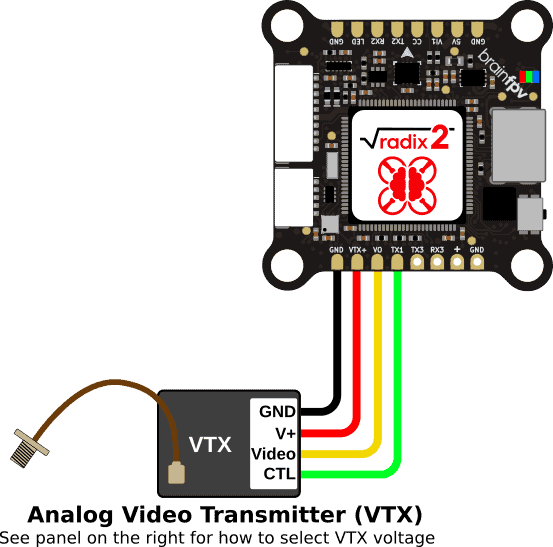
The video transmitter is connected to the RADIX 2 as shown below. The connections are as follows:
- Ground (GND): Ground reference voltage. Always needed.
- Power (VTX+, V+): Voltage to power the video transmitter. Either 5 V or the voltage used to power the RADIX 2, depending on which jumper is soldered.
- Video: The analog video signal. Needs to be connected to the Video Output (VO) of the RADIX 2.
- Control (CTL): Some video transmitters can be configured by the flight controller using e.g. the TBS SmartAudio protocol. If your video transmitter supports this feature, connect it to a serial port (UART) TX pin. In the diagram below it is connected to TX1 (UART1, TX). This connection is optional and you can chose to not connect it and configure your video transmitter by other means E.g. using the button or switches on the video transmitter.
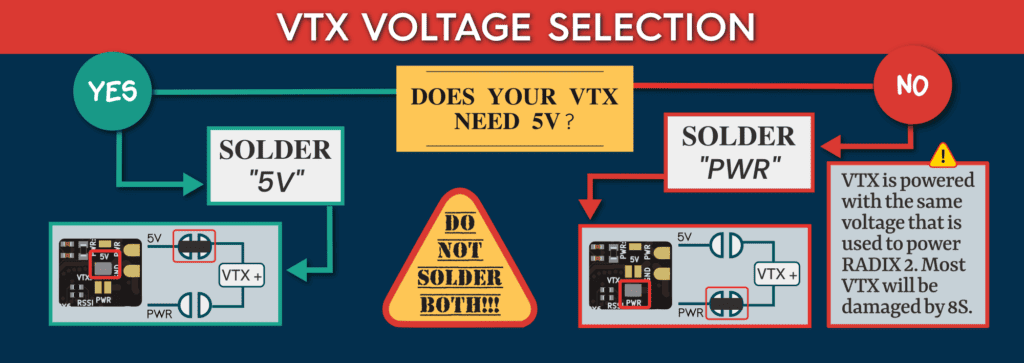
The voltage to power the video transmitter is selected by soldering one of the soldering either the 5V OR the PWR jumper, as shown below. NEVER SOLDER BOTH! DOING SO WILL DAMAGE YOUR RADIX 2!
 Video Transmitter Pit Switch
Video Transmitter Pit Switch
The RADIX 2 features a “Video Transmitter Pit Switch” that allows you to completely power off the video transmitter using the switch on your RC transmitter. This can be useful if you are working on your drone, or if you are e.g. waiting for the GPS to get a fix. In those situations, the pit switch allows you to power off the video transmitter and prevent it from overheating or interfering with others flying at the same time. The pit switch of the RADIX 2 also features an integrated fast fuse that will trigger if your video transmitter draws more than 1.2 A. This prevents damage to the flight controller if you e.g. accidentally short the VTX+ pad to ground. The fuse can be reset by toggling the pit switch.
If you are using Betaflight, the pit switch can be enabled using the USER1 switch:

Connect DJI Digital FPV System
The RADIX 2 can be used with the DJI Digital FPV System. Note that you won’t be able to take advantage of the BrainFPV graphical OSD when you use a digital system, as it only works with analog video. However, you will still get an OSD rendered by the digital system, like with other flight controllers.
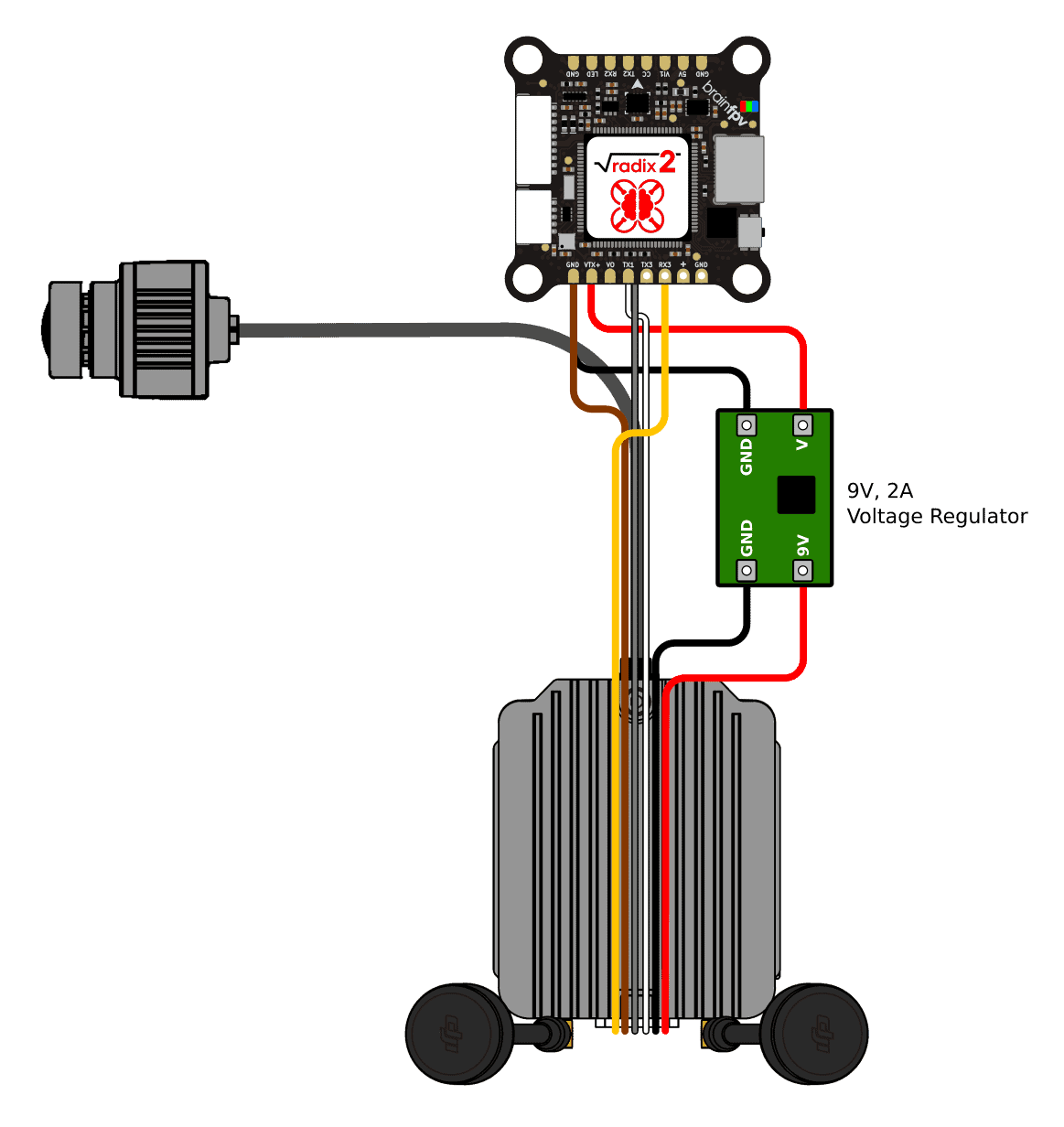
The Air Unit of the DJI system only supports up to 4S, so we recommend using a separate voltage regulator to power it. A good choice is a 9 V / 2 A regulator. Note that if you use the RADIX 2 Power Board, you can switch the voltage regulator on the Power Board to 10 V by bridging the jumper and then connect the red and black wires of the Air Unit to the 5V and GND pads of the Power Board to power it.
The recommended way to connect it is as follows and shown in the diagram below:
- RED (Power): Connect to voltage regulator output. Connect voltage regulator input to VTX+ pad of RADIX 2.
- BLACK (Power GND): Connect to voltage regulator ground. Connect voltage regulator ground to GND of RADIX 2.
- WHITE (OSD RX): Connect to TX1 of RADIX 2. This wire is used to send OSD data to the Air Unit.
- GRAY (OSD TX): Connect to RX1 of RADIX 2 (note: RX1 is on the bottom side of the RADIX 2). This wire is used to receive OSD data from the Air Unit.
- BROWN (Signal GND): Connect to GND of RADIX 2.
- YELLOW (DJI HDL): Connect to RX3 of RADIX 2 if you use the Air Unit for RC control. If you use a separate RC receiver, leave this wire unconnected.
If you power the external voltage regulator from the VTX+ pad, make sure to solder the “PWR” jumper to enable voltage output to the voltage regulator. See “VTX Voltage Selection” in the previous section.
Enabling MSP Displayport OSD
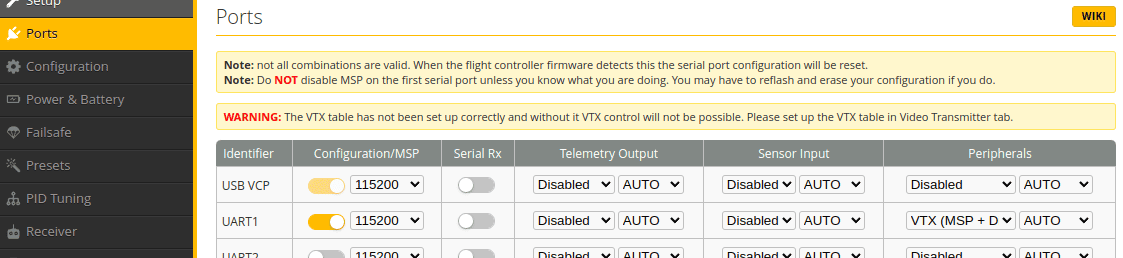
In order for the flight controller to send OSD information to the Air Unit, UART1 needs to be set to “VTX (MSP + Displayport)” under Peripherals as shown below. In addition, the following CLI command needs to be used to disable the analog OSD and enable the MSP OSD used by the digital FPV system:
set osd_displayport_device = MSP
save
Using the Pit Switch with the HD System
If you are powering the digital FPV system from the VTX+ pad of the RADIX 2, as shown above, and you are using a separate RC receiver, you can use the “pit switch” functionality of the RADIX 2 to turn power to the Air Unit on and off. If you are using Betaflight, the pit switch can be enabled using the USER1 switch:
Connect GPS Receiver
You can connect a Global Positioning System (GPS) receiver to the RADIX 2. Having a GPS on board allows you to see the coordinates of your location in the OSD (very useful for finding your drone after a crash) and you can display the ground speed as well. In addition, you can use “GPS Rescue Mode” with Betaflight or Return-to-Home (RTH) with iNAV for autonomously flying the drone back to you if for example the video malfunctions or if you lose connection between your RC transmitter and receiver. Note that this functionality is considered somewhat experimental and you should only rely on it after you have tested it several times and you are sure it works reliably.
We recommend using the BrainFPV GPS, but any module with a uBlox Neo-M8 chipset will work. The GPS will need to be connected to GND / 5V of either the RADIX FC or the RADIX PB. The serial wires of the GPS (TX and RX) need to be connected to a RX / TX pair of the RADIX FC. Note that the wires are crossed, i.e., TX of the GPS connects to RX of the RADIX FC and vice versa.
Some GPS receivers also have an integrated magnetometer (compass). To use it, the compass needs to be supported by the firmware you are using. The SCL and SDA pads or wires of the GPS are the I2C bus that is used for the magnetometer data, they need to be connected to the SCL and SDA pads of the RADIX 2 (don’t cross the wires, i.e., connect SCL to SCL and SDA to SDA).
The diagram below shows the GPS connected to UART5, but you can use any UART that is not used otherwise.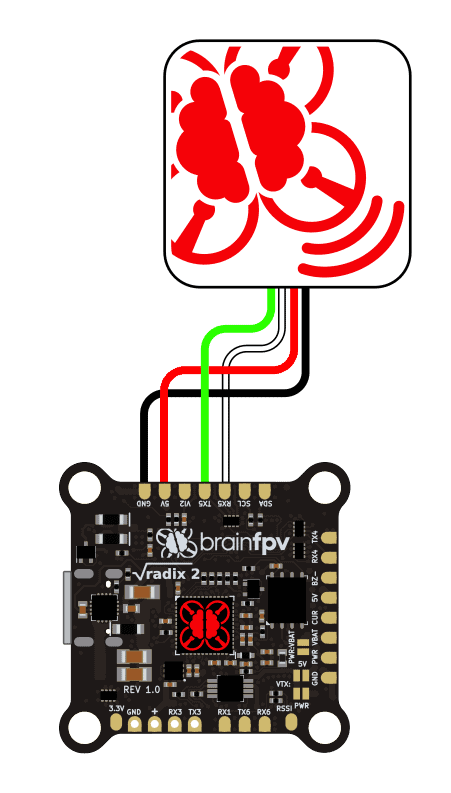
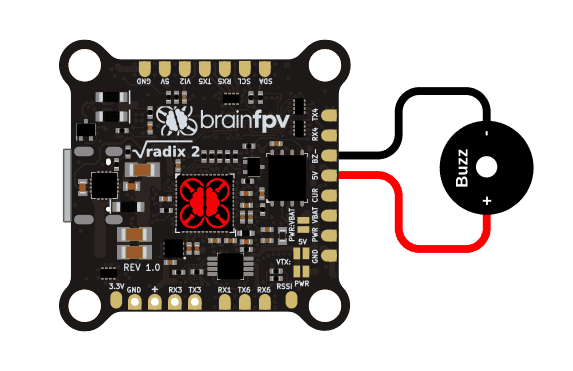
Connect Buzzer
You can connect a 5V buzzer to the RADIX 2. The buzzer is useful for indicating warnings and also for locating your drone when you crash in tall grass etc. Any DC (direct current) 5V buzzer should will work. The current drawn by the buzzer should be less than 200 mA, which should be the case for pretty much every buzzer sold for drones out there. Note that modern ESC’s can use the motors to buzz, which is maybe not as loud as an actual buzzer, but loud enough for locating your drone. So installing a buzzer is optional, as long as you setup the motors to be used as buzzer, or if you don’t want a buzzer at all and risk losing your precious drone ;).
If you use a buzzer, wire it as follows shown below. The buzzer + pad needs to be connected to a 5 V pad on the flight controller. The buzzer – pad to the BZ- pad. When the buzzer is activated, the flight controller ties the BZ- to ground using a FET, which activates the buzzer.
Connect 4-in-1 ESC
Refer the to the RADIX 2 4-in-1 ESC connection manual for how to connect a primary and secondary 4-in-1 ESC to your RADIX 2.
Connect Servos
Its is possible to connect servos to the RADIX 2, which allows you to for example tilt the FPV camera during flight. If you use a quadcopter or hexacopter, you can use the outputs S7 and S8 for servos. If you use an octocopter, you can re-configure the UART2 pins (RX2 and TX2) to be used for servos.
Using S7 and S8 for Servos
To use S7 and S8 for servos, enable the SERVO_TILT feature in the Betaflight configurator and type the following in the CLI to remap the outputs:
resource MOTOR 7 NONE
resource SERVO 1 E13
resource MOTOR 8 NONE
resource SERVO 2 E11
save
Using RX2 and TX2 for Servos
To use RX2 and TX2 for servos, enable the SERVO_TILT feature in the Betaflight configurator and type the following in the CLI to remap the outputs:
resource SERIAL_RX 2 NONE
resource SERVO 1 A03
resource SERIAL_TX 2 NONE
resource SERVO 2 A02
save
Note: If you only need one servo, you can only use the first 2 lines (and “save”) to use the RX2 pad for the servo output. This allows you to still use TX2 for UART functionality that only requires a single wire, e.g., SmartAudio to configure your video transmitter.